Wir kommen jetzt von den mechanischen Sperren zu den elektronischen Systemen. Diese bieten mehr als nur eine Sperrwirkung und finden sich in vielen modernen SUVs.
Dies ist der vierte Teil unserer Reihe über Differenzial-Sperren.
Die ganze Artikelserie über Differenzial-Sperren
- Sperriger Ausgleich – Die verschiedenen Differenzialsperren – Teil 1
- Sperriger Ausgleich – Das Torsen-Differenzial – Teil 2
- Sperriger Ausgleich – Kupplungsbasierte Sperrdifferenziale – Teil 3
- Sperriger Ausgleich – Elektronische Traktionskontrolle – Teil 5
Kurz zurück zum Grundproblem: Unser Geländewagen muss weiterfahren können, auch wenn eines oder mehrere Räder die Traktion verloren haben. In den vorherigen Teilen haben wir bereits das Problem beschrieben und wie es mechanisch gelöst wird. Sogenannte offene Differenziale können bereits keinen Vortrieb mehr leisten, wenn ein Rad die Traktion verloren hat. Abhilfe schafft eine teilweise oder vollständige Sperrwirkung in den Differenzialen des Fahrzeugs.
Nun kommen wir zu den kupplungsbasierten Sperren, die elektronisch gesteuert werden. Diese Sperren können:
- alleine in einer Achse als Achssperre wirken
- der zuschaltbare Allradantrieb sein
- oder die Kraft zwischen Vorderachse und Hinterachse und den Rädern verteilen
Die Bandbreite reicht von manuell zuschaltbaren Systemen bis hin zur komplett durch einen Computer geregelten Ansteuerung von Achsen und Rädern.
Nicht überall, wo Sperre drauf steht, ist auch eine Sperre drin
Oft bezeichnen Autohersteller ihre auf dem ABS-Bremssystem-basierten Traktionskontrollen als elektronische Sperre, z.B. ELD für Electronic Lock Differential oder BLD für Brake Lock Differential. Das ist irreführend, da diese Technik, die wir im fünften Teil vorstellen, nichts mit einer Differenzialsperre zu tun hat. Sie simulieren lediglich eine Differenzialsperre durch Bremseingriffe. Echte elektronische Sperren sind solche, die über einen Computer entweder pneumatisch, hydraulisch oder elektrisch aktiviert werden.
Der Computer regiert
Bei allen elektronisch geregelten Differenzialen ist ein Computer (Steuergerät) dafür verantwortlich, die Funktion des Differenzials zu steuern. Dynamisch während der Fahrt und unter Berücksichtigung aller zur Verfügung stehenden Fahrparameter. Dazu zählen Lenkwinkel, Drehzahldifferenzen zwischen Rädern und Achsen, Geschwindigkeit, Differenzialtemperatur, Last und dem Wunsch des Fahrers zu beschleunigen oder nicht. Auch der Zustand anderer Fahrsysteme wie ABS und ESP werden dabei berücksichtigt.
Das Steuergerät entscheidet gezielt, wann, wo und wie stark eine Sperrwirkung auf- oder abgebaut wird. Bei manchen Fahrzeugen kann der Fahrer einen Modus wie zum Beispiel „Geländemodus“ auswählen. Dadurch aktiviert das System je nach Fahrzeug zum Beispiel eine 100-prozentige Sperrwirkung in einer Achse.
Proaktiv oder Reaktiv
Die Ansteuerung kann rein reaktiv erfolgen. Stellt das System beispielsweise Schlupf an einem Rad fest, steuert es dagegen. Andere Systeme arbeiten proaktiv. In diesem Fall versucht das Steuergerät „vorzudenken“ und zu prognostizieren, wie die Fahrsituation in wenigen Augenblicken sein wird.
Elektronisch gesteuerte Limited-Slip-Sperren
Bevor wir zu den Torque-Vectoring-Systemen kommen, stellen wir einfache Lamellenkupplungen vor. Da mit Lamellenkupplungen unterschiedliche Sperrwirkungen erzeugt werden können, von offen bis zur hundertprozentigen Sperre, sprechen wir auch hier von Limited-Slip. Sie können eine begrenzte Sperrwirkung erzeugen, indem sie die Lamellen durchrutschen lassen.
Die Lamellenkupplung wird entweder per Hydraulik oder mit einem Elektromotor und Hebeln betätigt. Ihre Ansteuerung erfolgt über das elektronische Steuergerät. Wenn die Hydraulik mit Ventilen versehen ist, können auch Sperren mit Gerotor-Pumpe elektronisch gesteuert werden, wie beispielsweise die EGerodisc von Eaton.
Bekannte Vertreter mit elektronisch angesteuerten Kupplungssperren sind der Range Rover 3, der Land Rover Discovery 4 und der Jeep Grand Cherokee mit Quadra-Drive II.
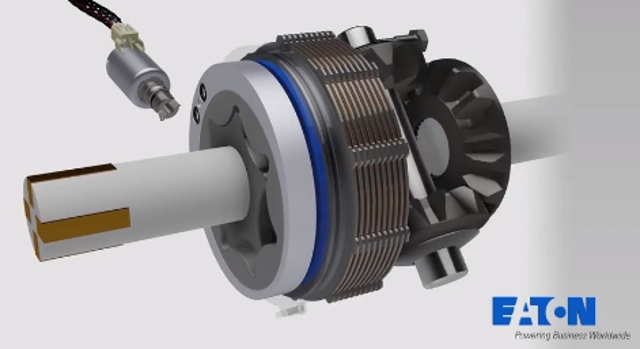
© Foto: Eaton
Fahrverhalten der kupplungsbasierten Limited-Slip-Sperren
Im Gegensatz zu den Torque-Vectoring-Systemen können kupplungsbasierte Limited-Slip-Sperren nicht die Kraft dynamisch zwischen den Rädern einer Achse verteilen. Sie können dort nur die Sperrwirkung bis auf 100 Prozent ansteigen lassen.
Zuschaltbarer Allradantrieb und Sperre in Kombination
In der Praxis nutzen viele Hersteller beides in Kombination. Eine Lamellenkupplung zur automatischen Kräfteverteilung vorne/hinten und in der Hinterachse zur Verteilung rechts/links mit der Möglichkeit 100 Prozent zu sperren.
Torque-Vectoring
Torque-Vectoring, auch als Active-Yaw bekannt, geht weit über die Funktion einer reinen Sperre hinaus. Neu ist dieses System nicht, es fand in Serie erstmals 1996 im Mitsubishi Lancer Evolution 4 seinen Einsatz.
Beim Torque-Vectoring kann die Antriebskraft stufenlos für jedes Rad geregelt werden. In der Praxis wird die Kraft meistens nur zwischen vorderer und hinterer Achse und zwischen den hinteren Rädern unterschiedlich verteilt. Die Vorderräder werden nicht individuell angesteuert, da die Wirkung an der Hinterachse größer ist.
Ein Bestandteil dieser Systeme sind die Lamellenkupplungen. Darüber haben wir bereits im 3. Teil: Kupplungsbasierte Sperrdifferenziale ausführlich gesprochen. Sie sind als nass-laufende Kupplungen ausgelegt. Die Betätigung erfolgt zumeist über eine Hydraulik mit mechanischer oder elektrischer Pumpe und Ventilen. Die Nutzung eines hydraulischen Systems ermöglicht den Entwicklern mehr Freiheit bei der Positionierung der einzelnen Komponenten. Ebenso ist eine elektromechanische Ansteuerung möglich, wie sie beispielsweise BMW im xDrive-System verwendet.
Verschiedene Torque-Vectoring-Technologien
Es gibt verschiedene technische Lösungen um Torque-Vectoring zu realisieren. Wir erklären die Funktion an zwei verschiedenen Systemen: Überlagerungsgetriebe mit Lamellenkupplungen und reine Lamellenkupplungen. Das erste System hat ein mechanisches Differenzial, das andere nicht.
Allen Systemen ist gemein, dass der Allradantrieb zugeschaltet wird. Die Kräfteverteilung zwischen vorne und hinten ist entweder statisch vorgegeben oder wird dem Bedarf entsprechend dynamisch eingestellt.
Es gibt Torque-Vectoring-Systeme, die die Drehmomentverteilung zwischen vorne und hinten über den per Kupplung zugeschalteten Allradantrieb steuern. Die linke und rechte Seite steuern sie per Bremseingriff. Eine energiefressende und verschleißbehaftete Methode. Diese Technik findet sich oft in Fahrsicherheitssystemen, wie DSC (Dynamic Stability Control, BMW) oder ESP (Electronic Stability Program, Mercedes). Dort werden Räder gezielt abgebremst, wenn ein Ausbrechen, Über- oder Untersteuern droht.
Torque-Vectoring mit Kupplung und Überlagerungsgetriebe
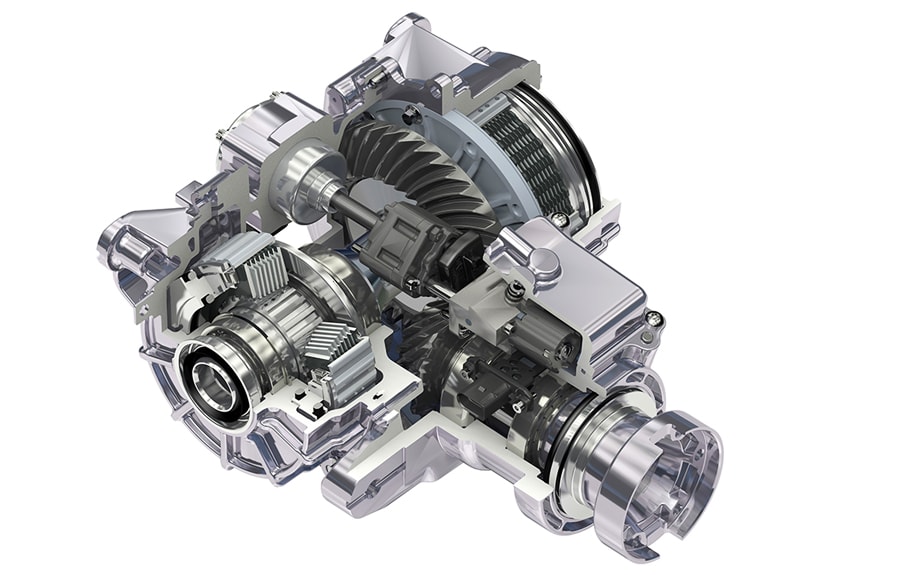
Beispielsweise wählten Audi (Sport Differenzial) und BMW (Dynamic Performance Control im xDrive) den Weg, ein klassisches mechanisches Differenzial mit zwei Überlagerungsgetrieben und Kupplungspaketen zu erweitern.
In der Abbildung des Audi Sportdifferenzials sind gut die normalen Differenzialkomponenten wie Tellerrad, Planeten- und Achskegelräder in der Mitte zu sehen. Rechts und links zu den Rädern hin befinden sich Zahnräder, dies ist die Überlagerungsgetriebe.
Diese Getriebe sind so ausgelegt, dass sie circa 10 Prozent schneller als die Antriebswellen zu den Rädern drehen. Zunächst haben sie keine Verbindung zu den Antriebswellen. Bei einer Kurvenfahrt wird die Hydraulikpumpe vom Steuergerät aktiviert. Am kurvenäußeren Rad schließen sich die Kupplungslamellen und das Überlagerungsgetriebe bekommt einen Kraftschluss mit der Antriebswelle. So treibt das schnellere Überlagerungsgetriebe seine Antriebswelle stärker an und entzieht über das normale Differenzial gleichzeitig der anderen Seite diese Kraft. Auf das kurvenäußere Rad wirkt jetzt ein höheres Drehmoment und erzeugt einen übersteuernden Effekt. Das Fahrzeug geht leicht und agil in die Kurve.
Bei dieser Torque-Vectoring-Technik wird die Kupplung aktiv geschlossen, um das Drehmoment individuell zu verteilen. Bei geöffneter Kupplung funktioniert das Differenzial wie ein klassisches, offenes Differenzial. Über den Allradantrieb kann die Hinter- oder Vorderachse zwar vom Motor abgekoppelt werden, aber alle drehenden Wellen laufen weiter mit. Die Vorder- und Hinterachse sind über die Straße weiterhin miteinander verbunden. So bleibt der Energieverbrauch durch die drehenden Massen bestehen.
Torque-Vectoring mit Kupplung und ohne mechanisches Differenzial
Zuerst kam diese Technik im Nissan Juke auf den Markt. Land Rover und Jeep wählten GKN als Partner in der Entwicklung ihrer rein-kupplungsbasierten Differenziale. Sie verzichteten in ihren Systemen komplett auf das mechanische Differenzialgetriebe.
Dieses System findet sich beispielsweise im Range Rover Evoque, Land Rover Discovery Sport und Discovery 5. Hier heißt es Active Driveline. Beim Jeep Renegade und Jeep Compass bezeichnet der Hersteller das System als Active-Drive 1. Das GKN-Original heißt Twinster.
Ein ähnlich arbeitendes System, welches von Jeep und American Axle & Manufacturing für den Cherokee entwickelt wurde, hatte einige Probleme. Neben der mangelnden globalen Verfügbarkeit ein Grund weshalb sich Jeep GKN zugewandt hat.
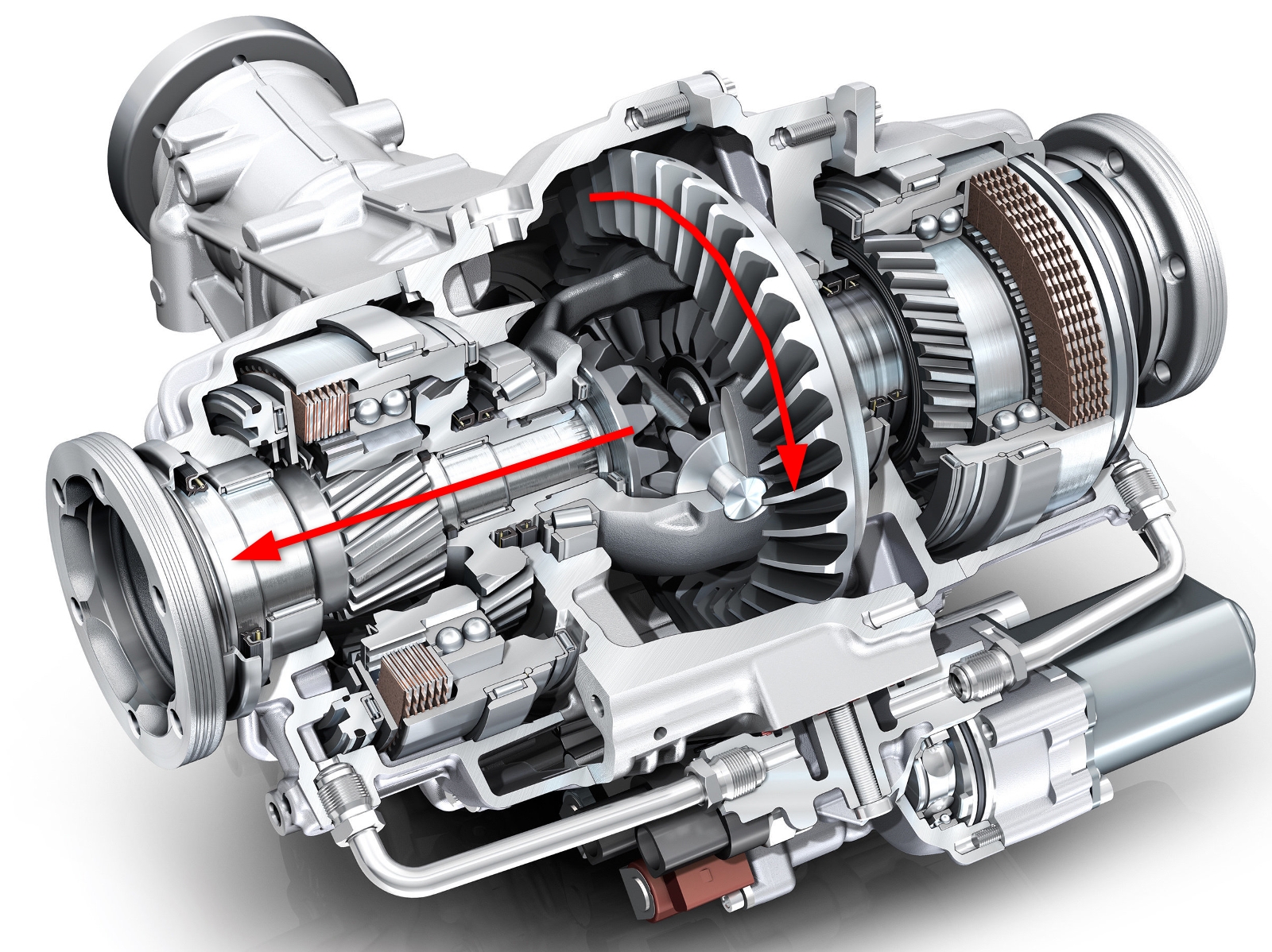
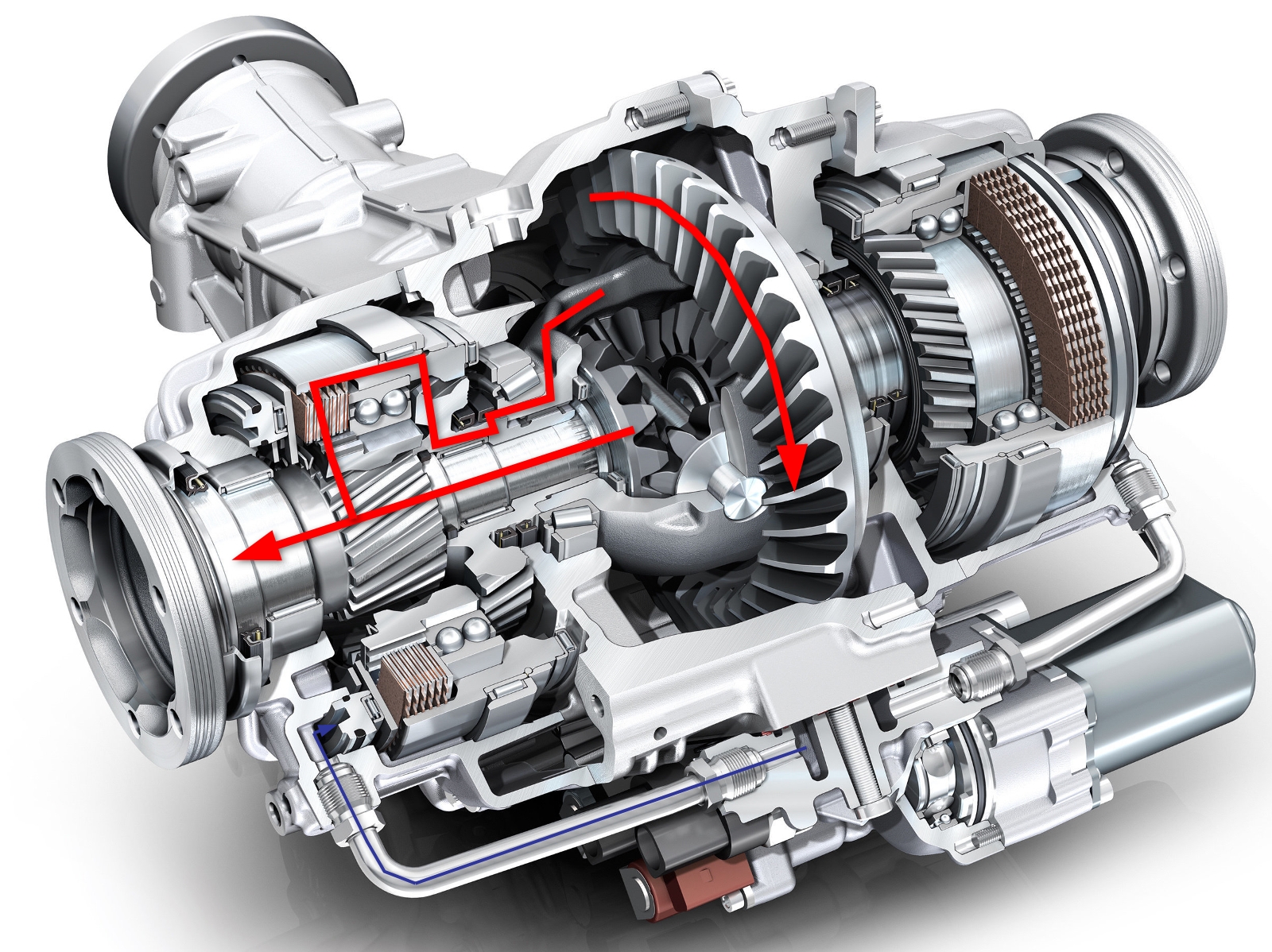
Beim Twinster übernehmen ausschließlich nass-laufende Lammellenkupplungen die Kraftverteilung zu beiden Seiten des Fahrzeugs. Bei Geradeausfahrt sind beide Pakete geschlossen. Eine Hydraulik drückt die Lamellenpakete gegen einen Federdruck zusammen. Der Drehzahlausgleich bei Kurvenfahrt wird durch durchrutschende Kupplungen ermöglicht. Je enger die Kurve, je stärker das Durchrutschen. Werden die Kupplungen hingegen fest geschlossen, entspricht das einer 100-Prozent-Sperre.
Das Steuergerät entscheidet innerhalb von 10 Millisekunden was zu tun ist. Dann erfolgt die Ansteuerung. Der gesamte Vorgang dauert ca. 300 Millisekunden. Das Steuergerät schaltet die optimale Kraftverteilung abhängig von den Fahrparametern und dem vom Fahrer gewählten Straßen- oder Geländemodus. Zu dem Active-Driveline-System gehört noch eine sogenannte Power Transfer Unit (PTU). Diese sitzt vorne am Getriebe und koppelt bei Bedarf, zusammen mit den Kupplungen im hinteren Differenzial, den gesamten Antriebsstrang nach hinten ab. So können die drehenden Massen reduziert werden. Das spart gemäß GKN zwischen 2 bis 4 Prozent an Treibstoff.
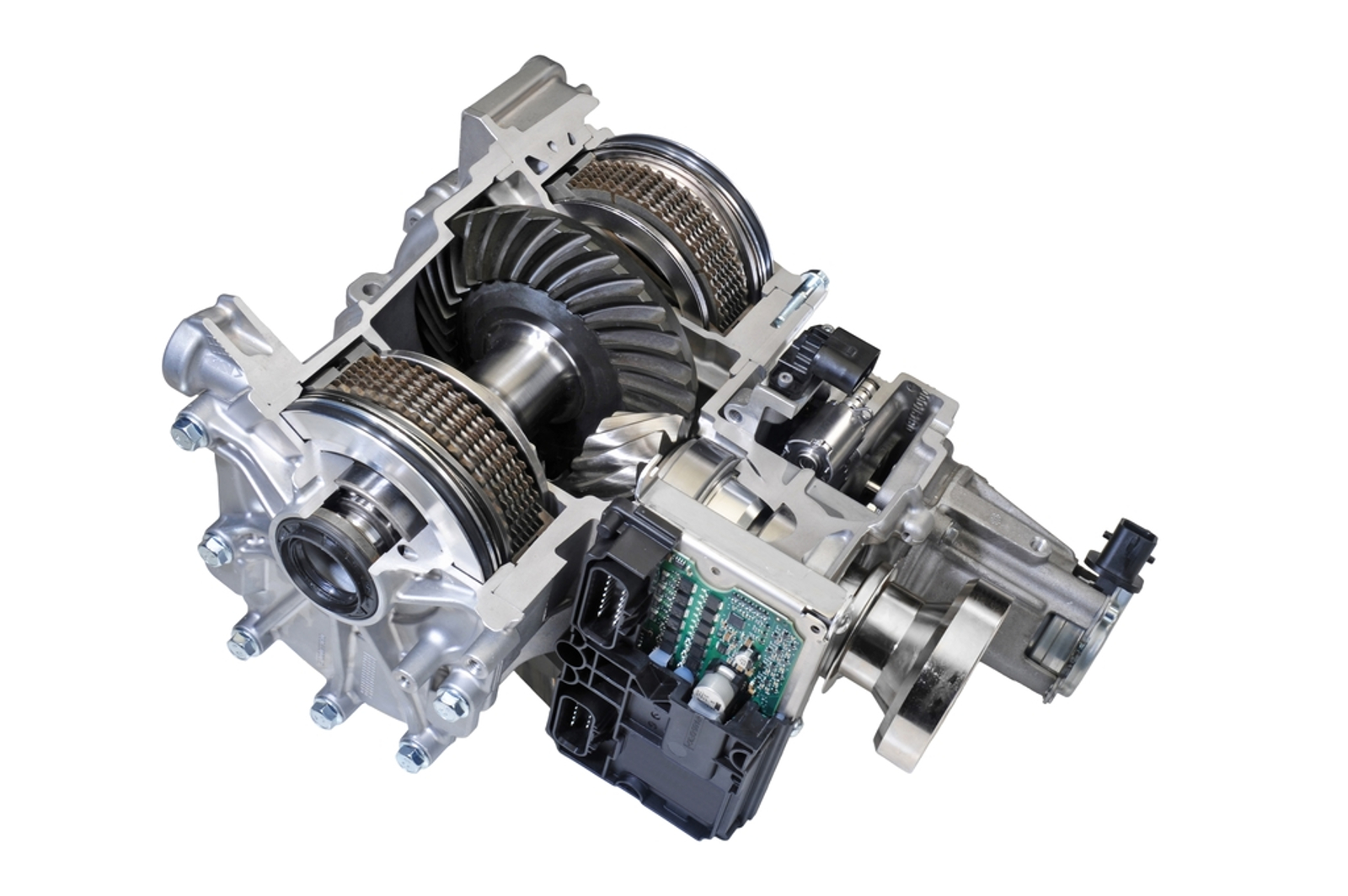
© Foto: Jaguar Land Rover
Fahrverhalten der Torque-Vectoring-Systeme
Das Fahrverhalten von Fahrzeugen mit Torque-Vectoring kann vom Prinzip her jeglichem Wunsch und Bedarf angepasst werden. Je nachdem, welchen Fahrzustand die Sensorik meldet und welchen Fahrmodus der Fahrer gewählt hat, kann das Steuergerät entsprechend seiner Programmierung darauf reagieren und an jedem einzelnen Rad eingreifen.
Auf der Straße wird zumeist ein agiles Kurvenfahren unterstützt. Je nach Hersteller wird beim Einfahren in die Kurve kurz mehr Drehmoment auf das kurveninnere Rad gegeben, um eine Stabilisierung zu erreichen. Dann wechselt das Drehmoment zum größten Teil auf das kurvenäußere Rad um ein Übersteuern zu erzeugen. Der Fahrer nimmt das als Unterstützung der Kurvenfahrt war. Der Wagen wirkt agiler und folgt besser dem Kurvenverlauf. Bei der Kurvenausfahrt verteilt sich das Drehmoment dann wieder gleichmäßiger und es wird mehr Drehmoment auf die Hinterräder als auf die Vorderräder gegeben, um eine kräftiges Beschleunigen aus der Kurve heraus zu ermöglichen.
Im Gelände werden die Kupplungen des zuschaltbaren Allradantriebs genutzt, um ihn hinzuzuschalten. Beim Torque-Vectoring schalten die Kupplungen durchdrehende Räder ab oder sperren sie. Ist noch ein mechanisches Differenzial vorhanden, werden die Räder an der Achse gesperrt, die Schlupf hat.
Schwachpunkte
Von Motorrädern wissen wir, dass gut behandelte Lammellenkupplungen sehr lange halten können. Dort werden sie jedoch nur zum Kuppeln beim Gangwechsel genutzt. Bei einem Geländewagen kommen sie wesentlich öfter zum Einsatz. Auf der Straße bereits in jeder Kurve. Kommt der Geländeeinsatz hinzu, werden sie noch stärker beansprucht. GKN gibt für sein wartungsfreies Twinster-Differenzial eine Lebensdauer von 150.000 bis 250.000 Kilometer an. Nicht, dass mechanische Differenziale ewig halten würden, aber ein vernünftig dimensioniertes, robustes Differenzial hält im Straßenbetrieb fast eine Ewigkeit.
Je nach System gibt es einen weiteren markanten Schwachpunkt in Bezug auf die Zuverlässigkeit. Vergleichen wir das System mit und ohne mechanischem Differenzial, fällt eines besonders ins Auge: Ist ein mechanisches Differenzial vorhanden, müssen die Kupplungen aktiv geschlossen werden, um Torque-Vectoring zu aktivieren. Möglicherweise ist diese Kombination nicht zu unterschätzen. Denn im Gegensatz System ohne Differenzial bleibt die Antriebsmöglichkeit hier beim Ausfall der Steuerung erhalten. Fällt beim differenziallosen System die Energiequelle für das Zusammenpressen der Kupplungen aus, ist der Vortrieb an dieser Achse verloren.
Kupplungsbasierte, elektronisch gesteuerte Lamellenkupplungen besitzen eine Temperaturüberwachung. Droht eine Überhitzung, reagiert die Steuerung. Beim Twinster-System werden beispielsweise erst die Kupplungen geschlossen, um Reibung zu vermeiden. Der Wagen fährt dann kurzzeitig mit starrer Hinterachse. Reicht das nicht, werden die Kupplungen geöffnet, bis sie sich ausreichend abgekühlt haben. Die Folge ist, dass die Achse keinen Antrieb hat. Bei den Systemen mit mechanischem Differenzial bleiben die Kupplungen offen und nur die gewünschten Effekte wie Lenkunterstützung oder Sperre bleiben aus. Der Vortrieb ist weiterhin gegeben.
Unter bestimmten Umständen kann solch ein blitzschnell reagierendes System sogar zu einer Verschlechterung der Fahrsicherheit sorgen. Stellt euch eine trockene Straße im Winter vor. Ihr fahrt vorsichtig in eine Kurve in der eine Eisfläche liegt. Die Vorderräder zeigen plötzlich Schlupf, es wird automatisch mehr Kraft nach hinten geleitet. Auf Eis kann das den Verlust des Seitenhalts der Hinterräder bedeuten. Denn je mehr Vortrieb ein Rad übertragen muss, je weniger Seitenhalt hat es. In Folge kann das Heck durch den plötzlichen Impuls ungewollt ausbrechen.
Wird die Drehmomentverteilung gar über Bremseingriffe geregelt, wie beim BMW xDrive DSC, kommt es zu hohem Verschleiß an den Bremsen. Etwas sportlichere BMW X5 Fahrer können davon ein Lied singen.
Fazit
Kupplungsbasierte Differenziale greifen aktiv in das Fahrverhalten ein, um es zu verbessern und sicherer zu machen. Auch im Gelände leisten sie einiges, wenn sie gut programmiert sind. Die Effekte auf der Straße und im Gelände sind zumeist positiv und erhöhen bei vernünftiger Nutzung die Sicherheit und den Fahrspaß. Aber wie alles, hat auch diese Medaille zwei Seiten. Die Frage ist, was der Besitzer von seinem Geländewagen erwartet? Bessere Straßenperformance oder ein robustes unverwüstliches Allradfahrzeug für das Gelände?
Die elektronischen Systeme wirken wie für die Straße gemacht
Sie bieten mehr Umweltschutz, mehr Sicherheit und mehr Fahrspaß. Gleichzeitig verlangen sie vom Fahrer weniger Können. Diese elektronischen Systeme verhalten sich wie Fahrassistenzsysteme, die einen Allradantrieb benutzen, um den Fahrspaß und die Sicherheit auf Asphalt zu erhöhen. Sie wirken nicht wie Systeme, welche für den fortgesetzten Geländeeinsatz konzipiert sind, auch wenn sie im Gelände ebenfalls einiges leisten.
Die positiven Effekte auf der Straße sind zweifelsohne gegeben, auch wenn diese Systeme dort ausgetrickst werden können. Gerade in der Anfangszeit hatten einige Hersteller mit Problemen zu kämpfen. Bei Tests mit verschiedenen SUVs mit elektronischen Lamellenkupplungen im Anhängerzugbetrieb ist ein BMW X5 mit Wohnwagen bei einer Kurvenfahrt auf rutschigem Untergrund immer wieder eingeknickt. Die Steuerung war mit der Situation auf nasser und rutschiger Fahrbahn schlichtweg überfordert.
Es darf nicht vergessen werden, dass bei solchen aktiv eingreifenden Fahrsystemen, das Verhalten des Fahrzeugs einprogrammiert ist. Es ist nicht mehr das Können des Fahrers gefragt, sondern vielmehr das Können des Entwicklers. Die gefühlten physikalischen Gegebenheiten und das Popometer treten in den Hintergrund.
Trügerische Sicherheit?
Die aktiven elektronischen Systeme lassen den Fahrer immer weiter in den Grenzbereich des Fahrzeugs vorstoßen. Die meisten Fahrer würden diesen ohne die elektronischen Helfer nicht beherrschen.
Dazu muss man sich nur vorstellen, wie es wäre, wenn das eigene Auto vier Gaspedale, vier Kupplungs- und vier Bremspedale hätte. Denn das ist es, was Torque-Vectoring bedeutet. Die Bedienung dieser „zwölf Pedale“ übernimmt der Computer. Das ist auf der einen Seite ein Vorteil, steigt doch der Fahrspaß, aber auf der anderen Seite hat es meiner Ansicht nach auch einen Nachteil. Der Fahrer verlernt zunehmend das Gefühl für das Fahrzeug und sicheres Fahren. Ständig nehmen ihm die zahlreichen elektronischen System diese Arbeit ab. Reizt der Fahrer die Technik vollends aus, werden die Reserven geringer. Nutzt er sie hingegen zurückhaltend, profitiert er von einem großen Sicherheitsgewinn.
Im Punkt Umweltschutz haben die Torque-Vectoring-Systeme die Nase vorn. Durch das Entkoppeln von Teilen des Antriebsstrangs, wird der gesamte Fahrwiderstand reduziert. In Folge verbraucht das Fahrzeug weniger Treibstoff und stößt weniger Abgase aus.
Ein System für moderne SUVs und gelegentlichen Geländeeinsatz
Der Vorteil der kupplungsbasierten Sperren liegt eher im Bereich des alltäglichen Fahrens und Reisens auf Asphalt. Auch auf schlechten Wegen und bei schlechten Wetterbedingungen und beim gelegentlichen Geländefahren helfen sie dem unerfahrenen Fahrer seinen Weg zu bewältigen. Beispielsweise im Jagdrevier, wo das Offroadfahren eine Notwendigkeit, aber nicht das Ziel, ist. Aber jenseits der unserer Infrastrukturen und von Werkstätten mit Diagnosecomputern können sie zu einem Problem werden.
Für den ernsthaften Geländeeinsatz bleiben mechanische Differenziale erste Wahl
Wir halten es wie der bekannte Expeditionsleiter und Pionier Tom Sheppard: Je mehr es „darauf ankommt“, desto mehr setzt er auf mechanische, kupplungslose Sperren und Allradsysteme. Für den harten und häufigen Offroad-Einsatz haben sie einfach mehr Vorteile.
Weniger Teile, weniger komplizierte, empfindliche Technik und keine Vernetzung mit anderen Systemen, machen mechanische Differenziale und Sperren immer noch zur ersten Wahl, wenn es auf Zuverlässigkeit unter widrigen Umständen ankommt.
Bei mechanischen Systemen ist die Wirkung immer und sofort da. Auch bei Reparatur und Reparaturkosten sind mechanische Systeme im Vorteil. Nicht in jeder Ecke der Welt gibt es Computer, um ein neues Teil im Antriebsstrang mit dem Steuergerät zu verheiraten.
Oder wie es Tom Sheppard zu sagen pflegt „It’s the driveline, stupid.“
Zum dritten Teil: Sperriger Ausgleich – Kupplungsbasierte Sperrdifferenziale – Teil 3
Zum fünften Teil: Sperriger Ausgleich – Elektronische Traktionskontrolle – Teil 5